| z1 | 計算に用いる一方の深さ。 One depth for the calculation. |
| z2 | 計算に用いる他方の深さ。
z1との大小関係は問わないがz1と同じであってはならない。 The other depth for the calculation. This depth may be greater than or less than z1 but must not be equal to z1. |
| p | 波線パラメータ。 A ray parameter. |
| structure | 1次元速度構造。 A 1D velocity structure. |
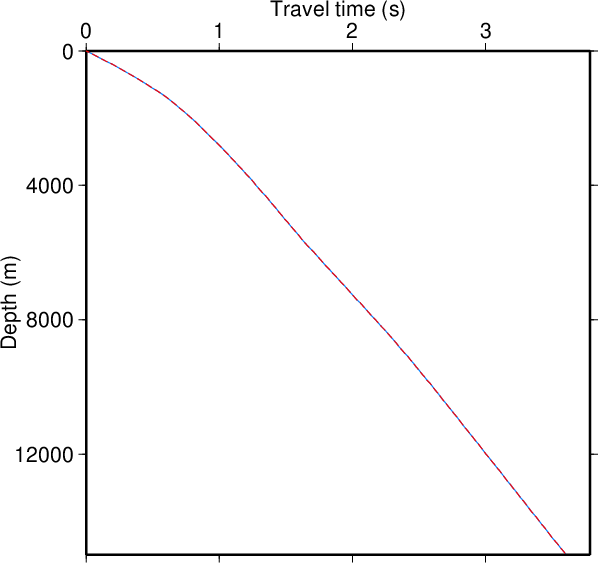
| 深さ(m) Depth (m) |
速度(m/s) Velocity (m/s) |
| 0 | 2000 |
| 1000 | 2500 |
| 2000 | 4000 |
| 5000 | 6000 |
| 6000 | 5000 |
| 8000 | 5000 |
| 11000 | 7000 |
| 13000 | 7000 |
| 15000 | 7500 |
|
#include <inc.h> int main(void) { //定数の宣言(Declare constants) const char outputfile[]="program1_result.dat"; //計算結果の出力先ファイル名 const double p=0.0001; //波線パラメータ(s/m) const double zmax=15000.0; //走時を計算する深さ範囲の上限(m) const double zinc=100.0; //走時を計算する深さ間隔(m) //変数の宣言(Declare variables) struct _1DvelocityStructure structure; //仮定する速度構造 FILE_L fp; double z; //波線の到達地点の深さ(m, ループ制御変数) double traveltime; //走時(s) //速度構造の設定 (Set velocity structure) sRoute; structure=get_1DvelocityStructure_memory(9); rRoute; structure.depths[0]=0.0; structure.depths[1]=1000.0; structure.depths[2]=2000.0; structure.depths[3]=5000.0; structure.depths[4]=6000.0; structure.depths[5]=8000.0; structure.depths[6]=11000.0; structure.depths[7]=13000.0; structure.depths[8]=15000.0; structure.velocities[0]=2000.0; structure.velocities[1]=2500.0; structure.velocities[2]=4000.0; structure.velocities[3]=6000.0; structure.velocities[4]=5000.0; structure.velocities[5]=5000.0; structure.velocities[6]=7000.0; structure.velocities[7]=7000.0; structure.velocities[8]=7500.0; structure.slope_shallow=0.5; structure.slope_deep=0.1; //出力ファイルのオープン (Open the output file) sRoute; fp=CKfopen(outputfile,"w"); rRoute; //ヘッダの出力(Write the headers) fprintf(fp.main,"#z(m)\ttraveltime(s)\n"); //深さ0mでの走時の出力 (Write the travel time at 0 m depth) fprintf(fp.main,"%e\t%e\n",0.0,0.0); //深さ0mを出発した波線が各深さに到達するまでの走時を計算・出力 //(Compute the travel time at each depth along the ray starting from 0 m depth) for(z=zinc;doublecmp(z,zmax)<=0;z+=zinc){ sRoute; traveltime= ray_traveltime_1Dscalar(0.0,z,p,structure); rRoute; fprintf(fp.main, "%e\t%e\n",z,traveltime); } //出力ファイルのクローズ (Close the output file) sRoute; CKfclose(fp); rRoute; //終了処理(Finish) return 0; } |
|
#include <inc.h> int main(void) { //定数の宣言(Declare constants) const char outputfile[]="program2_result.dat"; //計算結果の出力先ファイル名 const double p=0.0001; //波線パラメータ(s/m) const double zmax=15000.0; //走時を計算する深さ範囲の上限(m) const double zinc=100.0; //走時を出力する深さ間隔(m) const double dz=0.01; //走時計算に用いる差分刻み幅(m) const double z0=0.0; //以下、速度構造の定義 const double z1=1000.0; const double z2=2000.0; const double z3=5000.0; const double z4=6000.0; const double z5=8000.0; const double z6=11000.0; const double z7=13000.0; const double z8=15000.0; const double v0=2000.0; const double v1=2500.0; const double v2=4000.0; const double v3=6000.0; const double v4=5000.0; const double v5=5000.0; const double v6=7000.0; const double v7=7000.0; const double v8=7500.0; //変数の宣言(Declare variables) FILE_L fp; double z; //波線の到達地点の深さ(m, ループ制御変数) double v; //その深さでの速度(m/s) double theta; //その深さでの波線の角度(rad) double dl; //その深さでのdzに対応する波線距離(m) double traveltime; //走時(s) //出力ファイルのオープン (Open the output file) sRoute; fp=CKfopen(outputfile,"w"); rRoute; //ヘッダの出力(Write the headers) fprintf(fp.main,"#z(m)\ttraveltime(s)\n"); //深さ0mを出発した波線が各深さに到達するまでの走時を計算・出力 //(Compute the travel time at each depth along the ray starting from 0 m depth) traveltime=0.0; for(z=0.0;doublecmp(z,zmax)<=0;z+=dz){ //走時の出力 (Write the travel time) if(isdividable(z,zinc)) fprintf(fp.main,"%e\t%e\n",z,traveltime); //現在の深さでの速度の計算 (Calculate the velocity at current depth) if(z<=z1){ v=v0+(v1-v0)∗(z-z0)/(z1-z0); }else if(z<=z2){ v=v1+(v2-v1)∗(z-z1)/(z2-z1); }else if(z<=z3){ v=v2+(v3-v2)∗(z-z2)/(z3-z2); }else if(z<=z4){ v=v3+(v4-v3)∗(z-z3)/(z4-z3); }else if(z<=z5){ v=v4+(v5-v4)∗(z-z4)/(z5-z4); }else if(z<=z6){ v=v5+(v6-v5)∗(z-z5)/(z6-z5); }else if(z<=z7){ v=v6+(v7-v6)∗(z-z6)/(z7-z6); }else{ v=v7+(v8-v7)∗(z-z7)/(z8-z7); } //現在の深さでの波線角度の計算 (Calculate the ray angle at current depth) theta=asin(p∗v); //dzの深さ変化に対応する波線に沿った距離の計算 //(Calculate the length along the ray corresponding to the depth change dz) dl=dz/cos(theta); //走時の更新 (Update the travel time) traveltime+=dl/v; } //出力ファイルのクローズ (Close the output file) sRoute; CKfclose(fp); rRoute; //終了処理(Finish) return 0; } |