パラメータ名
Parameter name
|
意味
Meaning
|
可能なパラメータ値
Allowed parameter values
|
デフォルト値
Default value
|
| datadir |
使用する波形データ(SAC形式の時系列データ)が格納されているディレクトリパス。
A directory path in which the waveform data
(time series data in SAC format) are stored.
|
ディレクトリパスを表す文字列。
A string that represents a directory path. |
data |
| cut_st |
解析に使用する時間窓の先頭。
The beginning of the time window used for the analysis.
|
日付・時刻を表す文字列。
年、月、日、時、分、秒をカンマ(,)で区切って並べる。
秒は実数で与え、ほかは整数で与える。頭に0は付けない。
A string that represents a date and time,
expressed as the year, month, day, hour, minute and second
separated by commas (,).
Use a real number for the second, and integers for the other values.
Do not append 0 at the top of each value.
|
省略不可
Cannot be omitted |
| cut_en |
解析に使用する時間窓の末尾。
The end of the time window used for the analysis.
|
cut_stよりも後の日付・時刻を表す文字列。
年、月、日、時、分、秒をカンマ(,)で区切って並べる。
秒は実数で与え、ほかは整数で与える。頭に0は付けない。
A string that represents a date and time later than cut_st,
expressed as the year, month, day, hour, minute and second
separated by commas (,).
Use a real number for the second, and integers for the other values.
Do not append 0 at the top of each value.
|
省略不可
Cannot be omitted |
| taper_st |
使用する波形の後半に掛けるテーパーの開始時刻。
The beginning time of a taper
applied to a later part of waveforms used.
|
cut_stよりも後、cut_enよりも前の日付・時刻を表す文字列。
年、月、日、時、分、秒をカンマ(,)で区切って並べる。
秒は実数で与え、ほかは整数で与える。頭に0は付けない。
A string that represents a date and time
later than cut_st and earlier than cut_en,
expressed as the year, month, day, hour, minute and second
separated by commas (,).
Use a real number for the second, and integers for the other values.
Do not append 0 at the top of each value.
|
省略不可
Cannot be omitted |
パラメータ名
Parameter name
|
意味
Meaning
|
可能なパラメータ値
Allowed parameter values
|
デフォルト値
Default value
|
| greendir |
実用グリーン関数が保存されているディレクトリ。
A directory in which practical Green’s functions are stored.
|
ディレクトリパスを表す文字列。
A string that represents a directory path.
|
green |
|
green_subsubdir |
個々のサブディレクトリ内において実用グリーン関数の計算結果が保存されている
サブサブディレクトリ名。
waterPMLコマンドを用いて実用グリーン関数を計算した際に
パラメータoutput_dirで与えた値である。
A sub-sub directory name for the computation results of
practical Green’ functions
under each sub directory;
it is the value of parameter output_dir
of the waterPML command
used to compute the practical Green’s functions.
|
ディレクトリ名(パスを含まない)を表す文字列。
A string that represents a directory name,
not including its path.
|
PML |
|
green_snapname |
実用グリーン関数のスナップショットの名前。
実用グリーン関数をwaterPMLコマンドを用いて計算した際に
スナップショットの設定ファイル
内で用いたパラメータsnapnameの値を与える。
The name of snapshots in practical Green’s functions;
it is the value of parameter snapname in the
configuration file for snapshots
for the waterPML command
used in the calculation of practical Green’s functions.
|
ファイル名の一部をなす文字列。
A string used for a part of a file name.
|
source |
green_size |
実用グリーン関数の時刻サンプル数。
The number of time samples of practical Green’s functions.
|
正の整数。
A positive integer.
|
省略不可
Cannot be omitted |
| green_t0 |
実用グリーン関数の先頭時刻(s)。
The beginning time (s) of practical Green’s functions.
|
実数。
A real number.
|
0.0 |
| green_dt |
実用グリーン関数の時間刻み(s)。
Sampling interval (s) of practical Green’s functions.
|
正の実数。
A positive real number.
|
省略不可
Cannot be omitted |
| stfun_name |
\(s^{green}(t)\)の関数名。
Name of function \(s^{green}(t)\).
|
sequence/timefunc.h
で定義されている関数名から選択する。
Choose from the functions defined in
sequence/timefunc.h.
|
pow3-4 |
| stfun_tp |
\(s^{green}(t)\)の1つ目の時定数\(\tau_p\)(s)。
sequence/timefunc.h
での定義に基づく。
The first time constant \(\tau_p\) (s) of \(s^{green}(t)\),
based on the definitions in
sequence/timefunc.h.
|
正の実数。
A positive real number.
|
省略不可
Cannot be omitted |
| stfun_ts |
\(s^{green}(t)\)の2つ目の時定数\(\tau_s\)(s)。
sequence/timefunc.h
での定義に基づく。
The second time constant \(\tau_s\) (s) of \(s^{green}(t)\),
based on the definitions in
sequence/timefunc.h.
|
実数。
A real number.
|
パラメータstfun_tpの値。
The value of parameter stfun_tp.
|
パラメータ名
Parameter name
|
意味
Meaning
|
可能なパラメータ値
Allowed parameter values
|
デフォルト値
Default value
|
| dataseq_list_file |
使用する観測データと実用グリーン関数のリストファイル名。
The name of a file
that lists the observed data and practical Green’s functions.
|
ファイル名を表す文字列。
A string that represents a file name.
ファイルの書式
(File format)
|
dataseq.list |
| N |
使用するトレースの数。
The number of traces used.
|
パラメータMの値以上かつ
パラメータdataseq_list_fileで指定するファイルの
空行・コメントを除いた行数(\(N_{max}\))以下の正の整数。
なお\(N<N_{max}\)の場合には
パラメータdataseq_list_fileで指定するファイルでの登場順に
最初の\(N\)個の要素ソースが用いられる。
A positive integer
greater than or equal to the value of parameter M
and less than or equal to
the number of lines \(N_{max}\) (excluding empty lines and comments)
of the file specified by parameter dataseq_list_file.
If \(N<N_{max}\), only the first \(N\) elementary sources
(based on the order in the file specified by
parameter dataseq_list_file)
are used.
|
\(N_{max}\) |
| polezero_dir |
地震計の応答特性のファイルが格納されているディレクトリ。
A directory in which
files for poles and zeroes of seismometers are stored.
|
ディレクトリパスを表す文字列。
A string that represents a directory path.
|
$YMAEDA_OPENTOOL_DIR/winv/share/polezero
|
| green_zero_before |
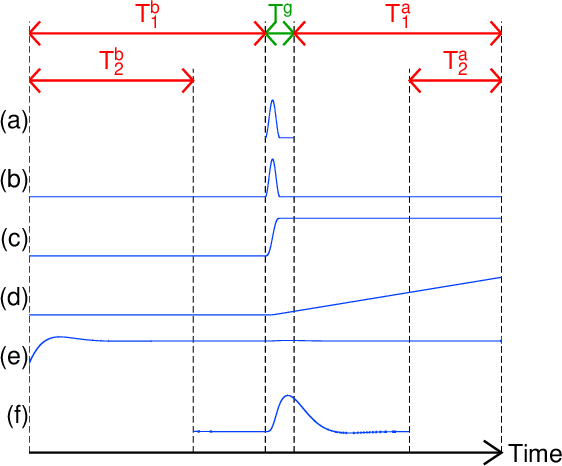
図2の\(T_1^b\)の値(s)。
The value of \(T_1^b\) (s) in Fig. 2.
|
正の実数。
A positive real number.
|
省略不可
Cannot be omitted |
| green_zero_after |
図2の\(T_1^a\)の値(s)。
The value of \(T_1^a\) (s) in Fig. 2.
|
正の実数。
A positive real number.
|
省略不可
Cannot be omitted |
| green_cut_before |
図2の\(T_2^b\)の値(s)。
The value of \(T_2^b\) (s) in Fig. 2.
|
\(T_1^b\)よりも小さな正の実数。
A positive real number less than \(T_1^b\).
|
省略不可
Cannot be omitted |
| green_cut_after |
図2の\(T_2^a\)の値(s)。
The value of \(T_2^a\) (s) in Fig. 2.
|
\(T_1^a\)よりも小さな正の実数。
A positive real number less than \(T_1^a\).
|
省略不可
Cannot be omitted |
| data_zero_before |
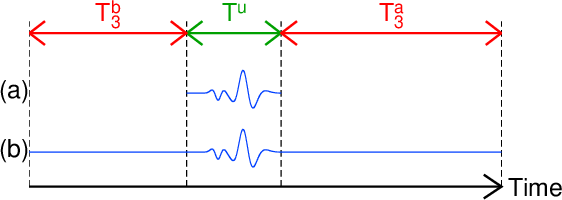
図3の\(T_3^b\)の値(s)。
The value of \(T_3^b\) (s) in Fig. 3.
|
正の実数。
\(T_3^b+T^u\)が
図2fのデータ長(\ref{eq.T3a.requirement}式の右辺)以下でなければならない。
A positive real number.
The value of \(T_3^b+T^u\) must be less than or equal to
the time length of the data in Fig. 2f
(the right hand side of Eq. \ref{eq.T3a.requirement}).
|
\(T_1^b-T_2^b\) |
パラメータ名
Parameter name
|
意味
Meaning
|
可能なパラメータ値
Allowed parameter values
|
デフォルト値
Default value
|
| source_location_min |
ソース位置のサーチ範囲の下限。
The lower limit of the search range for the source location.
|
\(x\), \(y\), \(z\)座標のサーチ範囲の下限(m)を
カンマ(,)で区切って並べた文字列。
座標は整数でなければならない。
A string composed of the lower limits of the search ranges of
\(x\)-, \(y\)-, and \(z\)-components (m).
Separate the coordinates by commas (,).
The coordinates must be given in integers.
|
省略不可
Cannot be omitted |
| source_location_max |
ソース位置のサーチ範囲の上限。
The upper limit of the search range for the source location.
|
\(x\), \(y\), \(z\)座標のサーチ範囲の上限(m)を
カンマ(,)で区切って並べた文字列。
上限は下限以上でなければならない。また
座標は整数でなければならない。
A string composed of the upper limits of the search ranges of
\(x\)-, \(y\)-, and \(z\)-components (m).
Separate the coordinates by commas (,).
The upper limit must be greater than or equal to the lower limit.
The coordinates must be given in integers.
|
省略不可
Cannot be omitted |
| source_location_inc |
ソース位置のサーチの間隔。
Intervals of the search for the source location.
|
\(x\), \(y\), \(z\)座標のサーチ間隔(m)を
カンマ(,)で区切って並べた文字列。
間隔は正の整数であってかつ上限と下限の差の約数でなければならない。
A string composed of the intervals (m) of the searches in
\(x\)-, \(y\)-, and \(z\)-directions.
Separate the intervals in the three directions by commas (,).
The interval in each direction must be a positive integer
and must be a divisor of the difference
between the upper and lower limits of the search range.
|
省略不可
Cannot be omitted |
| zminmax_reverse |
ソース位置のグリッドサーチを浅い(\(z\)が大きい)側から行うか否か。
計算の最終結果には影響しないが、時間のかかる計算の途中段階で
浅い場所での結果を確認したいか、深い場所での結果を確認したいか
に応じて選択する。
A choice of whether to perform a grid search for the source location
from shallower (larger \(z\)) side or not.
This choice does not affect the final result;
however, the choice affects whether the user can look at the results
for shallow or deep candidate source locations
during a computation that takes time.
|
- yes
浅い側から行う。
Perform a grid search from a shallower side.
- no
Perform a grid search from a deeper side.
|
yes |
| residual_lp_fc |
グリッドサーチにおいて残差の評価に用いる
ローパスフィルターのコーナー周波数(Hz)。
The corner frequency (Hz) of a low-pass filter
used in the evaluation of residuals in a grid search.
|
正の実数。
A positive real number.
|
省略不可
Cannot be omitted |
| residual_lp_n |
グリッドサーチにおいて残差の評価に用いる
ローパスフィルターの極の数。
The number of poles of a low-pass filter
used in the evaluation of residuals in a grid search.
|
正の偶数。
A positive even number.
|
2 |
| residual_tmin |
グリッドサーチにおいて残差の計算に用いる時間窓の先頭時刻\(t_{min}\)(s)。
なおパラメータcut_stで与えた日時を時刻\(t=0\)とする。
The beginning of a time window, \(t_{min}\) (s),
used for the computation of residuals in a grid search.
The time origin (\(t=0\)) is the date and time
given by parameter cut_st.
|
実数。
A real number.
|
0.0 |
| residual_tmax |
グリッドサーチにおいて残差の計算に用いる時間窓の末尾時刻\(t_{max}\)(s)。
なおパラメータcut_stで与えた日時を時刻\(t=0\)とする。
The end of a time window, \(t_{max}\) (s),
used for the computation of residuals in a grid search.
The time origin (\(t=0\)) is the date and time
given by parameter cut_st.
|
パラメータresidual_tminの値よりも大きな実数。
A real number greater than
the value of parameter residual_tmin.
|
パラメータcut_enの値に対応する時刻。
Time corresponding to the value of parameter cut_en.
|
パラメータ名
Parameter name
|
意味
Meaning
|
可能なパラメータ値
Allowed parameter values
|
デフォルト値
Default value
|
| outputdir |
計算結果の出力先のディレクトリパス。
The directory path for outputting the results.
|
ディレクトリパスを表す文字列。
A string that represents a directory path.
|
inversion_result |
| output_residual_value |
観測波形と合成波形の残差の値を出力するか否かの選択。
A choice of whether to output
the values of residuals between observed and synthetic waveforms.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
yes |
| output_solution |
震源時間関数と合成波形を出力するか否かの選択。
A choice of whether to output
the source time functions and synthetic waveforms.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
yes |
| output_green |
逆解析に用いた実用グリーン関数の時系列データを出力するか否かの選択。
A choice of whether to output
the time series data of practical Green’s functions
used for inversion.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
yes |
| output_residual |
それぞれの周波数における
(\ref{eq.inverse_problem})式の左辺と右辺の残差
を出力するか否かの選択。
A choice of whether to output
the residual between the left and right hand sides
of Eq. (\ref{eq.inverse_problem}) for each frequency.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
no |
| output_residual_trace |
観測波形と合成波形の残差の時系列データを出力するか否かの選択。
A choice of whether to output
time series data between observed and synthetic waveforms.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
no |
| output_contribution |
合成波形に対する各要素ソースからの寄与を出力するか否かの選択。
A choice of whether to output
the contribution of each elementary source
to synthetic waveforms.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
no |
| output_trans_tilt |
並進運動と傾斜変動のそれぞれの合成波形を出力するか否かの選択。
A choice of whether to output
each of the the synthetic translational and tilt waveforms.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
no |
| output_spectrum |
逆解析の過程に登場する各種のフーリエスペクトル
を出力するか否かの選択。
A choice of whether to output
various Fourier spectra
that are used in the intermediate process of inversion.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
no |
| output_matrix |
逆解析の過程に登場する各種の行列を出力するか否かの選択。
A choice of whether to output
various matrices
that are used in the intermediate process of inversion.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
no |
| output_singular |
特異値を出力するか否かの選択。
A choice of whether to output
the singular values.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
no |
| output_Nnonzero_singular |
ノンゼロ特異値の個数を出力するか否かの選択。
A choice of whether to output
the number of non-zero singular values.
|
- yes
出力する。
Output.
- no
出力しない。
Do not output.
|
yes |
| verbose |
画面に表示する計算の進行状況の種類。
A choice of information for the progress of computation
to be displayed.
|
- 0
進行状況を表示しない。
Do not display the progress.
- 1
発震機構パラメータのグリッドサーチの進行状況を表示する。
Display the progress of a grid search for
focal mechanism parameters.
- 2
上記に加え、ソース位置のグリッドサーチの進行状況を表示する。
In addition to the information above,
display the progress of a grid search for the source location.
- 3
上記に加え、逆解析の進行状況を表示する。
なお、この表示を行うと処理時間が有意に増加する。
In addition to the information above,
display the progress in each inversion.
This option increases the processing time
at unignorable level.
|
2 |
出力ファイル名
The output file name
|
出力されるデータ
The data in the output file
|
出力される条件
Conditions to output
|
|
data_obs/∗.seq1 |
使用した観測波形\(u_n^{obs}(t)\)の時系列データ。
The time series data of observed waveforms \(u_n^{obs}(t)\) used.
|
常に出力される。
Always created.
|
|
data_obs_spectrum/∗.imseq2 |
使用した観測波形のフーリエスペクトル\(\tilde{U}_n^{obs}(\omega)\)。
The Fourier spectra \(\tilde{U}_n^{obs}(\omega)\)
of observed waveforms used.
|
パラメータoutput_spectrum=yesの場合に出力される。
Created if parameter output_spectrum=yes.
|
|
stfun.seq2 |
実用グリーン関数の計算に用いた震源時間関数\(s^{green}(t)\)の時系列データ。
The time series data of a source time function \(s^{green}(t)\)
used for the computation of practical Green’s functions.
|
常に出力される。
Always created.
|
|
stfun_spectrum.imseq2 |
実用グリーン関数の計算に用いた震源時間関数の
フーリエスペクトル\(S^{green}(\omega)\)。
The Fourier spectrum \(S^{green}(\omega)\) of a source time function
used for the computation of practical Green’s functions.
|
パラメータoutput_spectrum=yesの場合に出力される。
Created if parameter output_spectrum=yes.
|
|
residual_value.dat |
ローパスフィルターを掛けた観測波形と合成波形の残差\(E\)
(\ref{eq.residual}式)。
The residual \(E\) (Eq. \ref{eq.residual})
between low-passed observed and synthetic waveforms.
|
パラメータoutput_residual_value=yesの場合に出力される。
Created if parameter output_residual_value=yes.
|
出力ファイル名
The output file name
|
出力されるデータ
The data in the output file
|
出力される条件
Conditions to output
|
|
Lambda/∗.cdm |
特異値分解で得られる行列\(\myvector{\Lambda}(\omega)\)。
周波数毎に別々のファイルに出力される。
A matrix \(\myvector{\Lambda}(\omega)\)
obtained by a singular value decomposition.
Separate files are created for individual frequencies.
|
パラメータoutput_matrix=yesかつ要素ソース数が2以上の場合に出力される。
Created if parameter output_matrix=yes
and the number of elementary sources is greater than or equal to 2.
|
|
UT/∗.bdm |
特異値分解で得られる行列\(\myvector{U}^T(\omega)\)。
周波数毎に別々のファイルに出力される。
A matrix \(\myvector{U}^T(\omega)\)
obtained by a singular value decomposition.
Separate files are created for individual frequencies.
|
パラメータoutput_matrix=yesかつ要素ソース数が2以上の場合に出力される。
Created if parameter output_matrix=yes
and the number of elementary sources is greater than or equal to 2.
|
|
V/∗.bdm |
特異値分解で得られる行列\(\myvector{V}(\omega)\)。
周波数毎に別々のファイルに出力される。
A matrix \(\myvector{V}(\omega)\)
obtained by a singular value decomposition.
Separate files are created for individual frequencies.
|
パラメータoutput_matrix=yesかつ要素ソース数が2以上の場合に出力される。
Created if parameter output_matrix=yes
and the number of elementary sources is greater than or equal to 2.
|
|
R/∗.bdm |
モデル解像度行列
\(\myvector{R}(\omega)\equiv
\myvector{V_P}(\omega)\myvector{V_P}^T(\omega)\)。
周波数毎に別々のファイルに出力される。
A model resolution matrix
\(\myvector{R}(\omega)\equiv
\myvector{V_P}(\omega)\myvector{V_P}^T(\omega)\)
obtained by a singular value decomposition.
Separate files are created for individual frequencies.
|
パラメータoutput_matrix=yesかつ要素ソース数が2以上の場合に出力される。
Created if parameter output_matrix=yes
and the number of elementary sources is greater than or equal to 2.
|
|
d_obs/d∗.cv |
観測データベクトル\(\myvector{\hat{d}^{obs}}(\omega)\)。
周波数毎に別々のファイルに出力される。
An observed data vector \(\myvector{\hat{d}^{obs}}(\omega)\).
Separate files are created for individual frequencies.
|
パラメータoutput_matrix=yesの場合に出力される。
Created if parameter output_matrix=yes.
|
|
G/G∗.bdm |
データ核\(\myvector{\hat{G}}(\omega)\)。
周波数毎に別々のファイルに出力される。
A data kernel \(\myvector{\hat{G}}(\omega)\).
Separate files are created for individual frequencies.
|
パラメータoutput_matrix=yesの場合に出力される。
Created if parameter output_matrix=yes.
|
|
m_est/m∗.cv |
推定したモデルベクトル\(\myvector{\hat{m}^{est}}(\omega)\)。
周波数毎に別々のファイルに出力される。
An estimated model vector \(\myvector{\hat{m}^{est}}(\omega)\).
Separate files are created for individual frequencies.
|
パラメータoutput_matrix=yesの場合に出力される。
Created if parameter output_matrix=yes.
|
|
green/∗.∗.seq1 |
解析に用いた実用グリーン関数\(d\tilde{g}_{nm}(t)/dt\)
(またはその積分、エンベロープ)。
The practical Green’ functions \(d\tilde{g}_{nm}(t)/dt\)
(or their integrals or envelopes)
used in the analysis.
|
パラメータoutput_green=yesの場合に出力される。
Created if parameter output_green=yes.
|
|
green_spectrum/∗.∗.imseq2 |
解析に用いた実用グリーン関数\(d\tilde{g}_{nm}(t)/dt\)
(またはその積分、エンベロープ)のフーリエスペクトル。
The Fourier spectra of
practical Green’ functions \(d\tilde{g}_{nm}(t)/dt\)
(or their integrals or envelopes)
used in the analysis.
|
パラメータoutput_green=yesかつoutput_spectrum=yesの場合に出力される。
Created if parameters output_green=yes
and output_spectrum=yes.
|
|
number_of_nonzero_singular_values.dat |
データ核\(\myvector{\hat{G}}(\omega)\)のノンゼロ特異値の個数。
The number of non-zero singular values
of data kernels \(\myvector{\hat{G}}(\omega)\).
|
パラメータoutput_Nnonzero_singular=yesの場合に出力される。
Created if parameter output_Nnonzero_singular=yes.
|
|
singular_values.dat |
データ核\(\myvector{\hat{G}}(\omega)\)の特異値のリスト。
A list of singular values
of data kernels \(\myvector{\hat{G}}(\omega)\).
|
パラメータoutput_singular=yesの場合に出力される。
Created if parameter output_singular=yes.
|
|
model/∗.seq1 |
推定した震源時間関数\(s_m^{est}(t)\)。
The estimated source time functions \(s_m^{est}(t)\).
|
パラメータoutput_solution=yesの場合に出力される。
Created if parameter output_solution=yes.
|
|
model_spectrum/∗.imseq2 |
推定した震源時間関数のフーリエスペクトル\(S_m^{est}(\omega)\)。
The Fourier spectra of the estimated source time functions
\(S_m^{est}(\omega)\).
|
パラメータoutput_solution=yesかつoutput_spectrum=yesの場合に出力される。
Created if parameters output_solution=yes
and output_spectrum=yes.
|
|
data_syn/∗.seq1 |
合成波形\(u_n^{syn}(t)\)。
Synthetic waveforms \(u_n^{syn}(t)\).
|
パラメータoutput_solution=yesの場合に出力される。
Created if parameter output_solution=yes.
|
|
data_syn_spectrum/∗.imseq2 |
合成波形のフーリエスペクトル\(\tilde{U}_n^{syn}(\omega)\)。
The Fourier spectra of synthetic waveforms
\(\tilde{U}_n^{syn}(\omega)\).
|
パラメータoutput_solution=yesかつoutput_spectrum=yesの場合に出力される。
Created if parameters output_solution=yes
and output_spectrum=yes.
|
|
data_trans/∗.seq1 |
観測点の位置における並進運動の合成波形。
Synthetic translational waveforms at station locations.
|
パラメータoutput_trans_tilt=yesの場合に出力される。
Created if parameter output_trans_tilt=yes.
|
|
data_tilt/∗.seq1 |
観測点の位置における傾斜変動の合成波形。
Synthetic tilt waveforms at station locations.
|
パラメータoutput_trans_tilt=yesの場合に出力される。
Created if parameter output_trans_tilt=yes.
|
|
contribution/∗.∗.seq1 |
合成波形に対する各要素ソースからの寄与。
The contributions from each elementary source to synthetic waveforms.
|
パラメータoutput_contribution=yesの場合に出力される。
Created if parameter output_contribution=yes.
|
|
contribution_spectrum/∗.∗.imseq2 |
合成波形に対する各要素ソースからの寄与のフーリエスペクトル。
The Fourier spectra of the contributions
from each elementary source to synthetic waveforms.
|
パラメータoutput_contribution=yesかつoutput_spectrum=yes
の場合に出力される。
Created if parameters output_contribution=yes
and output_spectrum=yes.
|
|
residual_trace.seq1 |
観測波形と合成波形の残差の時系列データ。
A time series data of residuals
between observed and synthetic waveforms.
|
パラメータoutput_residual_trace=yesの場合に出力される。
Created if parameter output_residual_trace=yes.
|